直线电机工作原理及选型深度分析
一、直线电机的基本结构与工作原理
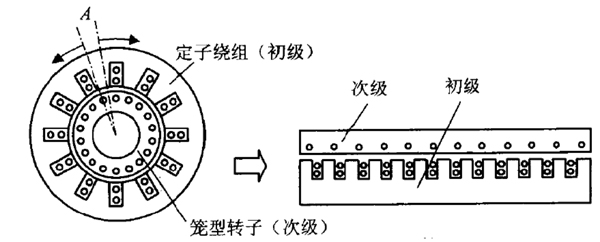
直线电机是展平了的旋转电机
1.1 直线电机的几种常见机构
几种常见的旋转型电机
每一种旋转电机,都有相应的直线电机与之对应

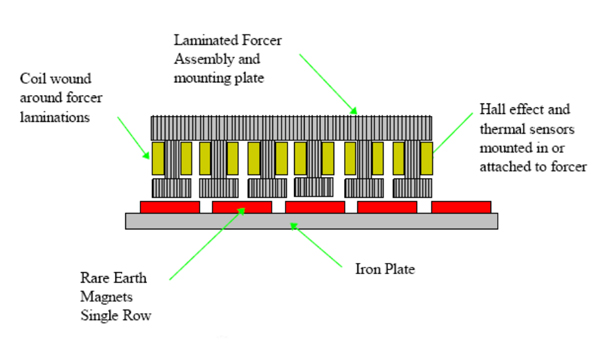
有铁芯直线电机
优点: 推力大,低成本,散热好
缺点: 有吸力,相当于推力的10倍齿槽、或挫顿力
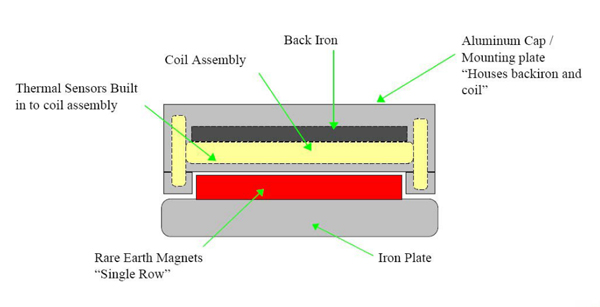
无铁芯直线电机
优点:无吸力,无齿槽, 动子质量轻
缺点: 散热差,刚性差,推力较小
无槽直线电机
是有铁芯和无铁芯的结 合体
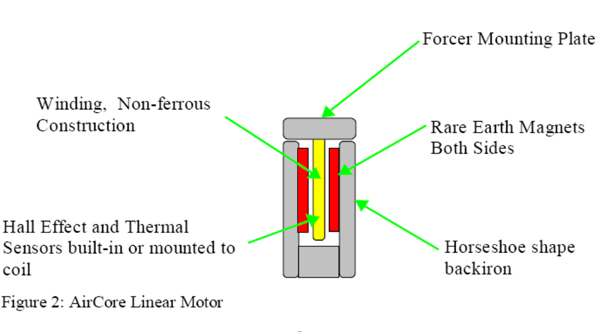
磁轴式直线电机
优点:无磁槽,磁力线全部利用,体积小,散热 好,工艺简单
缺点:推力小,刚性差,长度受限制
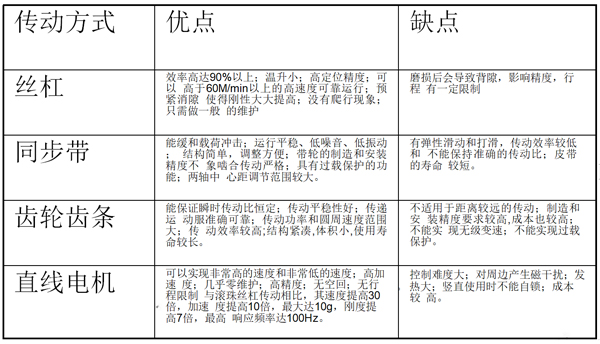
二、直线电机区别于传统传动方式
•高刚度,无传动间隙和柔度
•宽调速范围(1um/s—5m/s,丝杠<1m/s)
•高动态性能高加速度,可达10g
•极高的运动分辨率和定位精度
•无限行程
•无磨损免维护
•集成机械系统设计调整简单
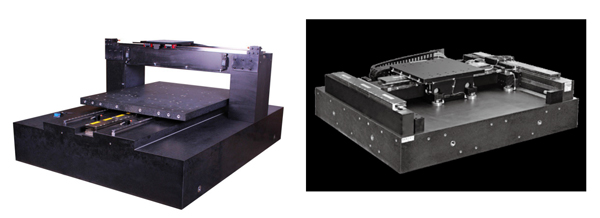
大行程高精度的终极解决方案
当一个平台的精度要求很高时,比如微米级或者纳米级的精度时,这时直线 电机是一个很好的选择,比如当直线电机和气浮导轨配合使用时,平台的定 位精度可达几十纳米,这是其他形式的平台所达不到的。
三、直线电机工作基本原理
直线电机不仅从结构上是从旋转电机演变 而来的,其工作原理也与旋转电机相似,遵 循电机学的一些基本电磁原理。这里直流永 磁直线电机为例子,说明一下直线电机的基 本工作原理。
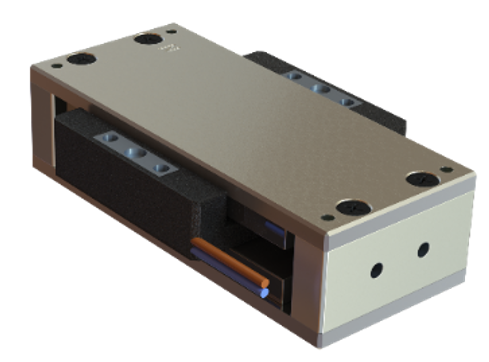
VLP0020-0160是一款音圈电机,和直线 电机在某种程度上是一致的。区别在于,音 圈电机只有一个线圈,磁极一般不超过2对, 只被要求在一对磁极的范围里运动,也就不 需要换相了。当需要突破这种行程限制,就 必需要有更多的磁极,和更多的线圈来接力, 这就是直线电机。所以音圈电机也叫做无换 向直线电机。
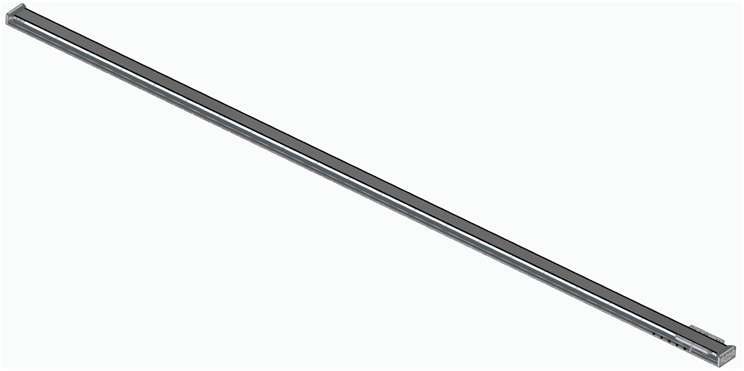
下图表示的是典型的平板直线电机的结构。图中的灰色的部分是底板, 黄色的方块为一块块的永磁体,黄色和灰色部分组成了直线电机的定子。相 邻两个永磁体的极性是相反的,所以磁力线的分布如图中所示。黄色的点表 示次级线圈中导线的横截面。
可以看到导线的方向基本垂直于磁力线的方向,当导线中通过电流时, 会产生安培力。由左手定则可以得知,根据导线中电流方向的不同,可以使 线圈产生向左或者向右的力。这个力就是使直线电机直接做直线运动的推力。

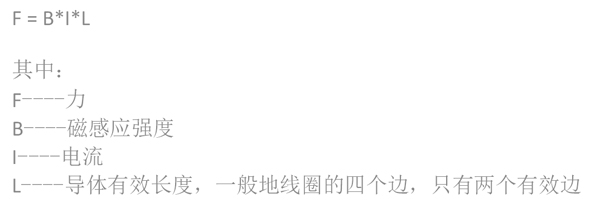
直线电机绝大部分为直流永磁同步直线电机。其他种类 的直线电机,如交流永磁同步直线电机、交流感应直线电机、步进直线电机。 这些电机工作的基本原理都是类似的:
位于磁场中的载流导体,该导体受到力的作用,力的方向可按左手定则确 定。力的大小由下面公式确定:
绕组形式
交叉覆盖方式,三个线圈组合占一个极 距,空间利用率高,动子较短。线圈无 效的两边可排列在磁场外,可以增加散 热效果
非覆盖平铺方式,三个线圈占2个极距, 一般用于大推力电机,线圈的成型工艺 简单,但线圈中央必须留空,磁场利用 率较低
对于带铁芯直线电机通常需要采用消齿槽的工艺,斜槽一个方法,还有就是采用分数 槽,错开磁极和铁芯的整倍数关系
四、直线电机
•小推力款型采用小极距设计(30mm),相同驱动下提高电流分辨率, 负面的影响是电机较宽
•线圈的有效长度比例增加,用于循环的无效长度比例减少,单位重量 的推力有所增大
•采用线圈定型工艺,最终线圈排布精确,控制精度高
•大推力款型X系列高于大部分竞争对手,如 kollmorgen 1600N,Hiwin1900N,Baldor 2300N,Accel 3000N
•Hall 传感器采用分体可脱卸设计,增加可维护性
•高导热树脂
五、直线电机参数
•极距(Electrical Cycle Length)
——一对磁极所占的长度,通常是N-N的距离,一般地推力大的电机, 极距也大,这和一对磁极间所能容纳的导线匝数和长度有关
•推力常数(Force Constant)
——每一安培电流所能产生的推力
•反电动势常数(Back EMF Constant)
——每1米/秒速度产生的反电势电压
•电机常数(Motor Constant)
——线圈产生的推力与消耗功率的比值
•持续电流(Continuous Current)
——线圈可以承受的连续通过的电流,持续通过这个电流时,线圈不会因为超过一定的 温度而有被损坏的危险
•持续推力(Continuous Force)
——当线圈通过100%负载率的持续电流时产生的推力
•峰值电流(Peak Current)
——线圈短时间内可以通过的最大电流,一般峰值电流通过的时间不超过1秒
•峰值推力(Peak Force)
——线圈的通过峰值电流时产生的推力
•线圈最高温度(Maximum Winding Temperature)
——线圈可以承受的最高温度
•电机电阻(Resistance 25°C, phase to phase)
——线圈在25°C时的相间电阻
•电机电感(Inductance, phase to phase)
——线圈的相间电感
Hall位置反馈
光栅位置反馈
霍尔效应传感器设在马达里被激活 的磁体的面上。在这些信号放大器 转换成适当的相电流。正弦换相是 使用线性编码器信号回到控制器。 一个共同的技术是利用霍尔效应同 步磁场位置,然后切换到正弦换相。 在任何情况下,换相的速度并非是 限制因素。

六、直线电机的选型
6.1 直线电机选型的重要性
直线电机系统的结构与旋转电机系统的结构有所不同。旋转电机往往通过丝杠、皮带轮等转 动部件转化为直线运动。而直线电机采用直接驱动技术,直线电机的性能起到了决定性的作用。 直线电机用户往往对负载的运动有一系列的要求。这样就需要我们为客户选择一款合适的电机。 如果选择不当,则可能达不到客户的要求,或者给客户造成成本不必要的上涨。并不是所有的传 统传动机构都能被直线电机替代,如果工作状态不能发挥直线电机的高速性能,这种替代可能是 不合理的。
传统的旋转电机可以通过减速机构保证功率的正常发挥,而直线电机系统的持续推力和最大推 力是有限制的,且却不能通过减速等方式产生更大的力。所以当速度很低时,力也不能变大,所 以正常的功率不能被发挥出来。
另外对于成本问题,直线电机的前期成本虽然高于丝杆,但对于高精度的应用时,高等级的丝 杆的采购成本也会比较高,并且此时丝杆系统也需要考虑安装线性编码器,这样直线电机和丝杆 之间的成本差距就会变得很小;并且丝杆传动的平台还存在着使用中的维护和磨损问题,由此带 来的人工成本和维护成本也不容小视,最后,随着直线电机的生产技术的提高以及量产化的不断 扩大,其采购成本也在不断降低。
6.2 根据客户的要求选择电机
直线电机的使用目前还没有旋转电机广泛,了解直线电机的用户还不是很多。用 户在想使用直线电机时,没有自行选择直线电机的能力。这样就需要我们根据用户的 要求来帮用户选择。
由于用户没有选择的能力,所以用户只会提供他们的要求。根据直线电机应用场 合,这些要求往往是:行程、加速度、最高速度等。实际上,我们的客户都不会给我 们这些数据。因为这些数据时需要计算出来的,用户往往不会去计算,或者计算出来 的数据并不准确。这时候就需要我们想客户了解,直线电机需要带动什么样的负载, 这个负载要做什么样的运动。
6.2.1 确定运动曲线
在确定负载的运动曲线之前,我们先要了解客户的负载是什么样的。很多客户的 负载都是加工件或者其他物料,直线电机除了驱动物料以外,还需要驱动放置或者固 定这些物料的置具或抓具。这些置具或抓具往往比物料更大、更重。我们需要了解的 是直线电机驱动的整个运动部分的质量。
这是我们选型时用到的真正负载:M1
直线电机选型的基本原则是根据马达的自身参数,利用数学关系计算出运动曲线 中所需要的最大推力和RMS力。当直线电机的最大推力和持续推力满足这些要求时才可 以选择。
我们以最常见的运动曲线为例,要求从负载在 t 时间内从该轴的A点运动到B点, 距离为 s 。当负载加速到某一速度 v 以后做匀速运动,到达B点时速度为0,停顿一段 时间后,再从B点返回A点,返回时的要求与之前一样,就这样做来回往复运动,直到 加工完成。
这样,我们可以根据客户的要求把t分为三部分: 加速时间:t1
匀速时间:t2 减速时间:t3
我们把停顿时间命名为t4。根据行程s,我们可以计算出t1、t2、t3,以及加速度a、减 速度‐a。这样我们就可以绘出运动曲线(v‐t),如下图

6.2.2 计算和选择
运动曲线图上每个部分的力都可以计算出来,具体的计算方法如下: 加速阶段的力:
F1=(M1+M2)*a+Fc
匀速阶段的力:
F2=Fc
减速阶段的力: F3=(M1+M2)*(‐a)+Fc 停顿时电机不出力:
F4=0
其中:
a是加速阶段和减速阶段的加、减速度
M1是总的运动负载的质量 M2是电机线圈的质量
Fc是克服摩擦力的需求力,精密直线导轨的摩擦系数一般为0.01,所以一般设 Fc=0.01(M1+M2)
这样,我们就可以算出整个过程中的RMS力和最大力
RMS力可由以下公式算出
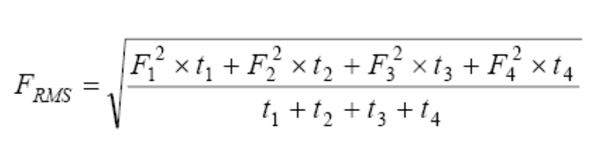
而最大推力Fmax=Max(F1,F2,F3,F4) 算出RMS力和最大推力以后,可以按照一定的流程来选择一款合适的直线电机
以上的计算只是在相对理想的条件下,实际应用时,系统往往对力有更高的需求,所 以我们在实际选型时,需要在计算中加入适当的余量。